
Cadre général
Une des particularités du site des alcools de Ris-Orangis était la présence de 3 ponts secteurs pour les manœuvres des wagons. L’intérêt d’un pont secteur est de ramener à sa seule longueur l’équivalent de plusieurs aiguillages successifs qui prendraient alors beaucoup plus de place avec un seul système de commande et une mécanique réduite. Ces trois ponts-secteurs distribuaient chacun un nombre de voies différent :
Pont secteur en bout du faisceau de réception des convois : 10,50 m, 4 voies
Pont secteur en bout du faisceau de chargement : 16,50 m, 4 voies
Pont secteur d’accès au grand bâtiment de maintenance : 16,50 m, 7 voies
La reproduction du site à l’échelle nous invitait évidemment à disposer de ces équipements et de les rendre fonctionnels pour l’animation du réseau!
Dans ce premier article, nous abordons la réalisation des plateformes et la liaison avec le moteur.
Premiers tests
Sans expérience sur ce type de matériel, le club s’est tourné en premier abord vers la production commerciale, en l'occurrence le pont secteur Faller (Ref 12 275 - entre 70 et 115 € suivant fournisseur) pour desservir 2, 3 ou 4 voies.
Si la dimension et la capacité du modèle convient pour le pont de 10,50 m du faisceau de formation, la commande du servo-moteur nous a semblé assez délicate à mettre en œuvre, et surtout l’adaptation et la commande du servo-moteur pour les positions de voies à réaliser.
Très vite, l'idée de la commande numérique à partir d’un module Arduino (Arduino Every (Modèle constructeur) : 17,95€ Amazon) et d’un module wifi pour piloter avec un téléphone portable, est apparue, et nous a permis un premier démonstrateur présenté en septembre 2021 lors du forum des associations de Ris-Orangis.
Notre premier constat a porté sur la fragilité et l’instabilité de la connexion wifi, que nous abandonnerons pour la commande du réseau au profit d'une commande par TCO et boutons poussoirs.
Etapes et tentatives.
Nous sommes évidemment passés par de nombreuses étapes pour nos réalisations. C’est le pont tournant secteur de la grande halle de maintenance qui nous a servi de banc test de développement!
D’abord pour la fosse du pont. Celle-ci a été réalisée en impression 3D, en s’inspirant du modèle Faller pour l’adapter à un pont secteur de 7 voies. Si la plateforme faisait partie du lot d'impression, nous avons vite changé pour une plaque d'époxy double face prévue pour l’électronique, pour sa rigidité et la possibilité de souder les rails directement dessus.
Sur le modèle Faller, le pivot de la plateforme est une excroissance de la fosse, alors que l’axe du servomoteur est décalé de quelques millimètres le mouvement étant transmis par un bras d'entraînement.
Nous avons choisi de placer l’axe moteur directement au niveau de l’axe de pivotement de la plateforme.
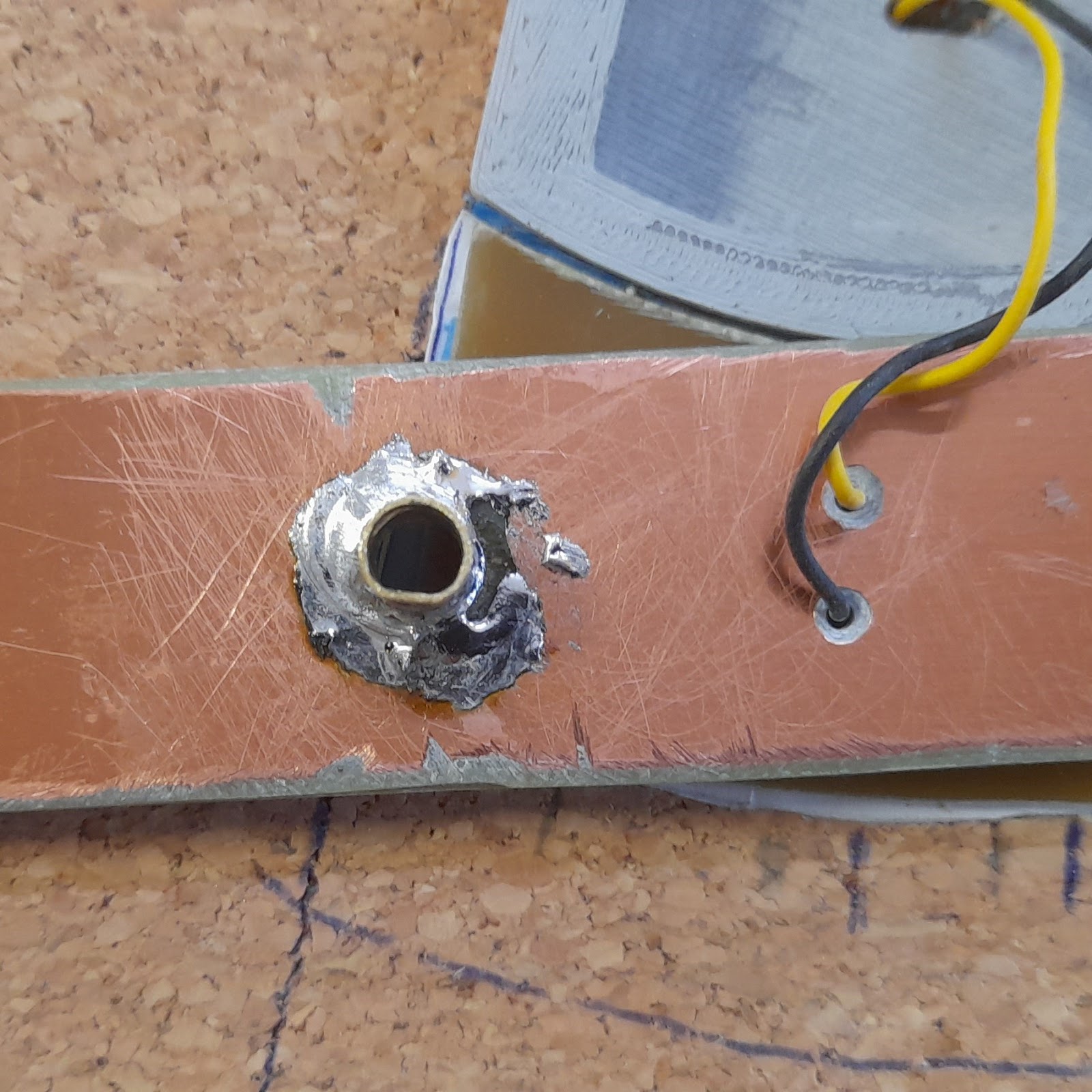
Le pivot de fixation au moteur, un tube de laiton adapté au diamètre de l’axe, est également soudé sur la plateforme, toute la difficulté étant de le positionner parfaitement orthogonal à la plaque!
Le moteur est un moteur pas à pas Stepperonline Nema 17 (moteur bipolaire) (17,36€ - Amazon).
Nous l’avons fixé sur une plaque en CP de 10mm par 4 vis de fixation, la plaque étant elle-même fixée sous le plateau du module par deux vis et venant soutenir le fond de la fosse du pont secteur. Le réglage de la position de l’axe moteur se fait par l’ajustement de la position grâce aux deux lumières d’extrémité de la plaque en CP permettant une liberté selon deux directions.
Déplacement du pont secteur
La plateforme est installée sur l’axe moteur par le dessus, le tube pivot disposant d’un méplat pour s’ajuster à l’axe et bloquer la position. Ce méplat est réalisé par martèlement en utilisant une tige métallique de mise en forme.
Pour améliorer le déplacement et en s’inspirant du modèle Faller, deux roulements ont été positionnés à l’extrémité opposée à l’axe. Deux cornières en laiton de Y x Ymm ont été soudées sous la plateforme et deux tiges en laiton servent d’axe pour les roulements. Ceux-ci reposent sur le fond de la fosse pour soutenir le poids des véhicules et faciliter la rotation. Les fils d’alimentation sont soudés aux rails et passent sous le plateau mobile, puis traversent le plateau du module jusqu'à un connecteur à vis. La longueur est adaptée pour pouvoir sortir la plateforme pour maintenance.
Photos en cours de réalisation





Aucun commentaire:
Enregistrer un commentaire